3d
搭建网站
一元函数微分学
终端
端口映射
大数据毕业设计
图像像素点测量温度
netty
数组
opengl
python自动化测试
图像视图
均线策略
志愿服务
循证研究
IO流
计算属性
图形渲染
VR云游
扫描线
rviz
2024/4/11 15:02:48
ROS中Rviz实时路径可视化的高效性能优化技巧
摘要
在ROS环境下使用Rviz时,随着时间的增加,通过Python可视化函数visualize_actual_path不断向Path消息中追加新的位置数据会导致处理和传输数据的时间显著增长,进而影响到rviz的刷新率和仿真流畅性。为了解决这一问题,本博客提…
qt.qpa.xcb: could not connect to display 0
问题
docker中启动rviz有问题 $ rviz qt.qpa.xcb: could not connect to display 0 qt.qpa.plugin: Could not load the Qt platform plugin “xcb” in “” even though it was found. This application failed to start because no Qt platform plugin could be initialize…

ros使用rviz订阅Image类型话题,显示yolov7目标检测结果
开发板深度相机系统Xavierrealsense D455ubuntu18.04
1、首先启动yolov7的ros节点,发布话题/image。 2、终端输入rviz,回车打开rviz,Add——>Image: 3、展开Image选项,选择要订阅的topic,左下角就显示出…

ROS 多机器人导航RVIZ环境的配置
文章目录 前言一、添加多个2D Pose Estimate/2D nav Goal二、RVIZ的其他配置1.RobotModel 总结 前言
前文ROS Turtlebot3多机器人编队导航仿真写了多机器人呢导航的代码实现,本文主要说明,RVIZ导航环境的配置,如何添加多个2D Pose Estimate/…
gazebo 仿真 kinect 获取点云数据
项目地址:https://github.com/yym68686/ros-slam
简介
使用 urdf 文件构建仿真机器人,在 gazebo 搭建仿真环境,导入人造卫星的 stl 文件,利用仿真 kinect 深度相机获取人造卫星的点云数据并在 RVIZ 中可视化,将 Poin…
ROS常见问题 | 虚拟机打开RVIZ闪退出错
文章目录 环境复现BUG原因解决环境
WIN10虚拟机 VMware Workstation16 Pro Ubuntu18.04
复现
使用rviz命令打开rviz
rviz -d xxx.rvizBUG
[ INFO] [1694154353.619329866]: rviz version 1.13.30
[ INFO] [1694154353.619364
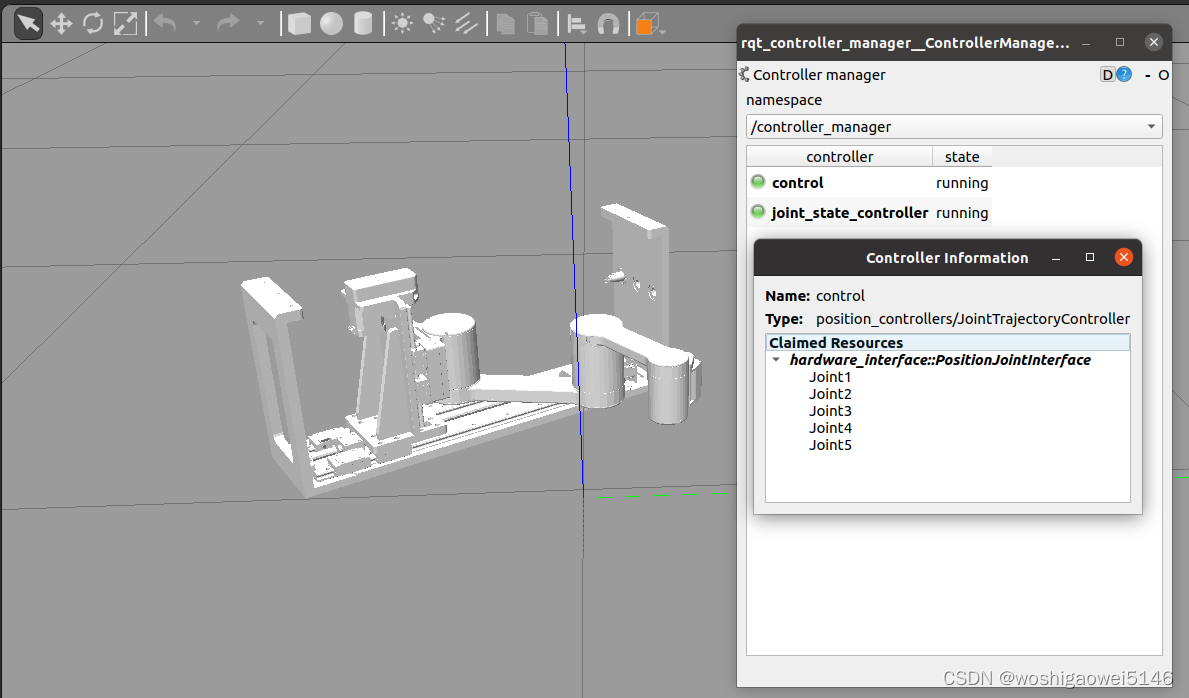
MoveIT Rviz和Gazebo联合仿真
文章目录环境安装概述ros_control框架ros_control数据流文件配置附加工具故障问题解决参考接前两篇:ROS MoveIT1(Noetic)安装总结 Solidworks导出为URDF用于MoveIT总结(带prismatic) MoveIT1 Assistant 总结 环境
Ubu…
多传感器融合SLAM --- 9.LIO-SAM如何运行、运行节点介绍
目录 1 LIO-SAM如何运行起来的
1.1 run.launch --- LIO-SAM主节点
1.2 module_loam.launch ---- 代码!启动!
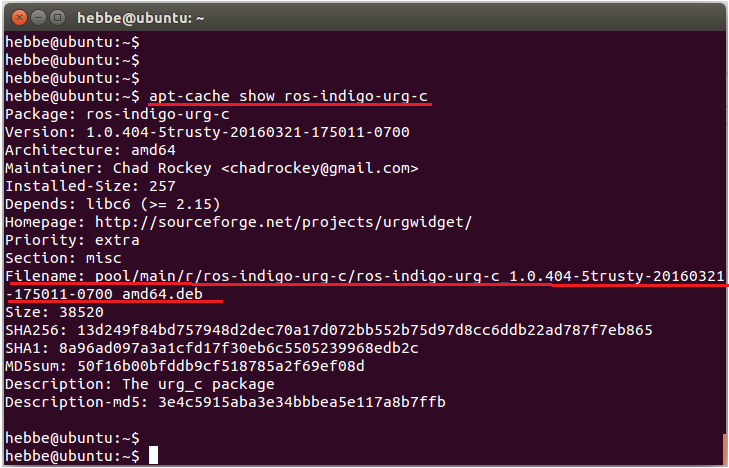
在ROS中使用Hokuyo激光雷达UST-10LX和UST-30LX
简述: 本文讲述的是hokuyo UST-10LX 和 UST-30LX 在Ubuntu14.04.5 ROS Indigo下进行实验。 运行环境: 系统:Ubuntu14.04.5 amd64(下载) ROS:ROS Indigo Igloo UST-10LX 或UST-30LX IP地址:192.168.211.221 其中&…
ROS工具RViz可视化3D空间的一些错误的解决方案
1、引言
RViz是ROS的一个可视化3D空间的工具,它用于帮助用户在ROS系统中导航、查看和交互。RViz可以显示来自各种ROS节点的信息,例如传感器数据、机器人的状态和路径等。通过RViz,用户可以以图形方式查看和交互各种ROS数据,非常直…
rviz是如何获取图像里选择的点云的3D坐标的
以前以为rviz是用OpenGL渲染绘图,那么获取图像里像素点对应的真实3D坐标是采用的OpenGL里提供的API实现的,结果一看代码还真不是这样,rviz也就渲染用了OpenGL,其他都是自己实现的,图像界面的实现完全是遵循MVC设计模式…
rviz配置文件是什么
在ROS中,RViz(Robot Visualization)的配置文件通常是以.rviz文件扩展名的文本文件,用于定义RViz的可视化设置和显示配置。这些配置文件允许您定义要在RViz中显示的3D可视化元素,如点云、激光扫描、机器人模型、地图、坐…

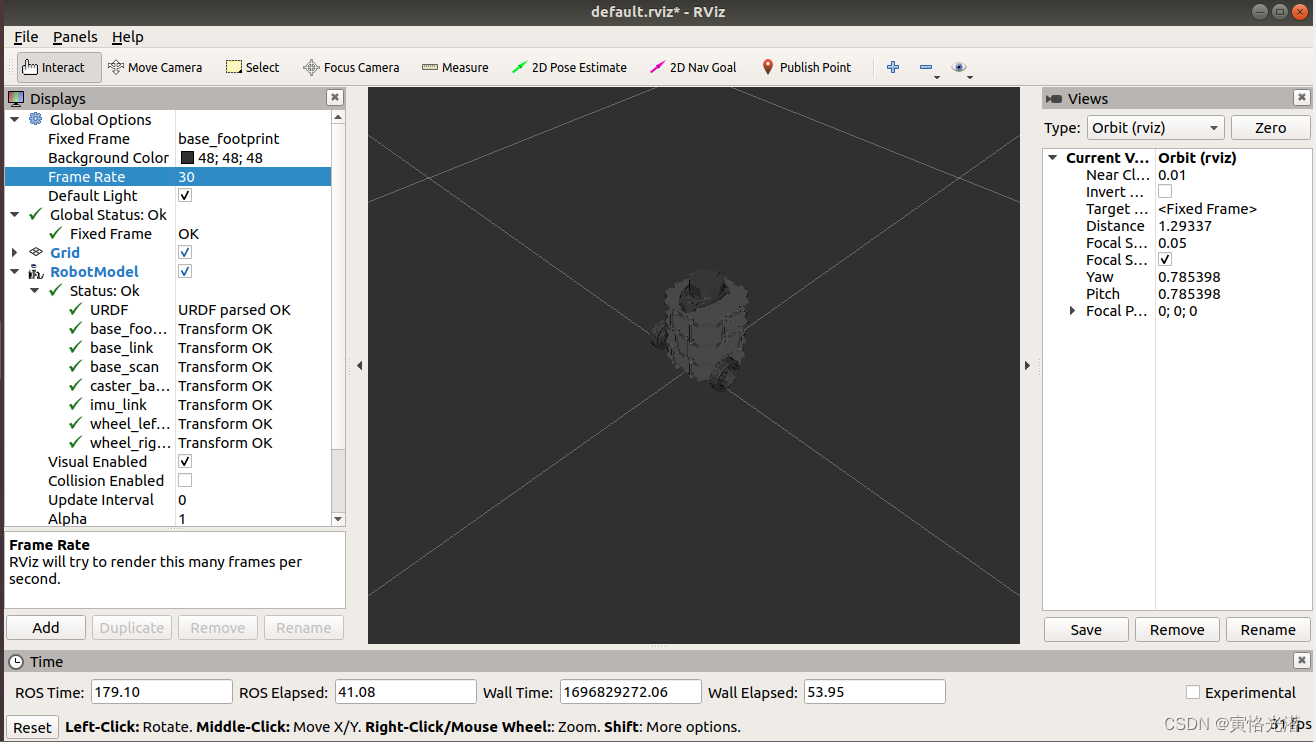
移动机器人激光SLAM导航(二):运动控制与传感器篇
参考引用 机器人工匠阿杰wpr_simulation 1. 机器人运动控制
1.1 测试环境安装
wpr_simulation 安装$ mkdir -p catkin_ws/src
$ cd catkin_ws/src
$ git clone https://github.com/6-robot/wpr_simulation.git
$ cd wpr_simulation/scripts/
$ ./install_for_melodic.sh # 自…
MoveIt教程 - Move Group (C++接口)
MoveIt教程 - Move Group (C++接口)
环境:
ubuntu20.04
ros noetic
克隆项目:
git clone https://github.com/ros-planning/moveit.git
git clone https://github.com/ros-planning/moveit_visual_tools.git
git clone https://github.com/ros-planning/moveit_tutori…
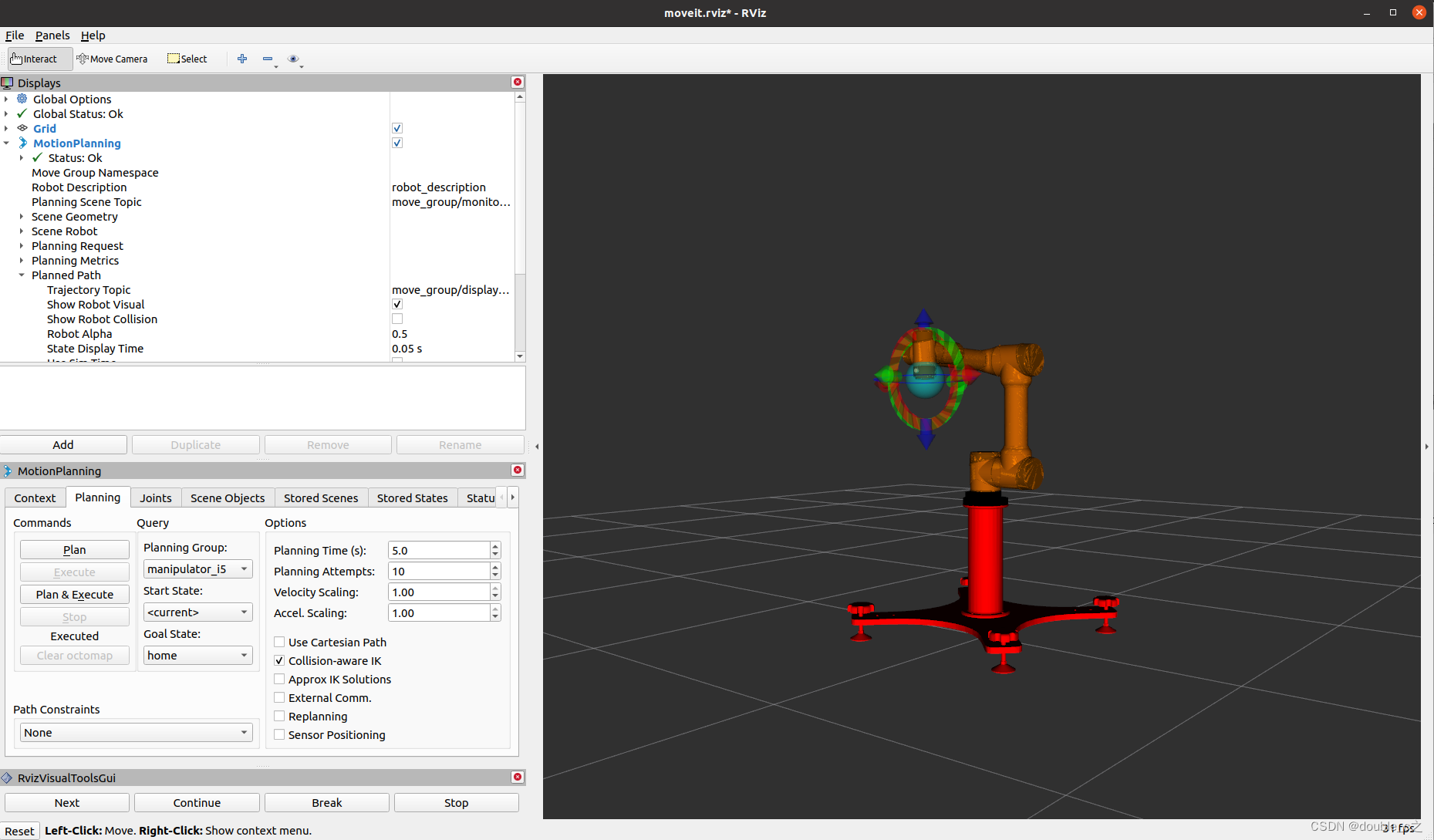
ubuntu20.04安装ros并配置相关环境以及驱动AUBO i5机械臂
ubuntu20.04安装ros并配置相关环境以及驱动AUBO i5机械臂 安装ros安装rosdep(小鱼的rosdepc,又快又好用)环境配置下载并编译aubo roslib库环境变量配置aubo gazeboaubo rviz驱动真实机械臂 安装ros
搜索鱼香ros网站https://fishros.com/,根据一键安装ros里提供的指…

【ROS】例说mapserver静态地图参数(对照Rviz、Gazebo环境)
文章目录 例说mapserver静态地图参数1. Rviz中显示的地图2. mapserver保存地图详解3. 补充实验 例说mapserver静态地图参数
1. Rviz中显示的地图
在建图过程中,rviz会显示建图的实时情况,其输出来自于SLAM,浅蓝色区域为地图大小,…